球盟会-《AI机器人控制进阶教程(入门版)》阅读指引
发布日期:2026-01-12
1、为什么要进修“AI+呆板人”?于最先动手试验前,理解“AI”与“呆板人”联合的价值至关主要。这不仅是技能的交融,更是开启智能体(Agent)将来的钥匙。
1. 从主动化到智能化传统呆板人依靠在切确的预编程,只能于布局化情况中事情。AI的引入(如计较机视觉、天然语言处置惩罚),付与呆板人感知、理解及决议计划的能力,使其能顺应开放、动态的真实世界。
2. 解决繁杂使命的焦点本课程的最终方针——“按颜色主动分类积木”——单一技能没法完成。它需要视觉(辨认)、决议计划(计划)、节制(履行)的协同,这恰是AI与呆板人体系深度交融才能解决的典型问题。
3. 前沿技能与职业标的目的“AI+呆板人”是智能制造、聪明物流、办事呆板人等范畴的焦点技能。把握此项技术,象征着您将站于呆板人工程师、AI算法工程师、智能体系集成师等前沿岗亭的出发点。
本课程的表现:您将切身体验AI怎样赋能呆板人:
• 让节制更直不雅:于试验09中,利用“拿起红色积木”如许的天然语言直接批示机械臂,暗地里是视觉语言模子(VLM)于理解您的用意。• 让感知更智能:于试验05-07中,为呆板人装上“眼睛”,经由过程OpenCV及手眼标定,让它能“瞥见”并定位物体。• 摸索前沿:试验11的具身智能试验,让您开端接触让AI模子拥有“身体”、经由过程交互举行进修的更高级形态。 2、课程总览:您将开启如何的进修之旅?
2、课程总览:您将开启如何的进修之旅?本课程是一个从零最先、手脑并用的实践指南。经由过程11个递进式试验,您将完备走完“传统节制 → 仿真与强化进修 → 视觉语言模子(VLM)运用”的技能演进路径,终极构建一个能听、会看、能履行的智能机械臂体系。
焦点进修闭环感知(视觉)→ 决议计划(计划/AI)→ 履行(节制)
十个焦点试验组成了您的进修阶梯:
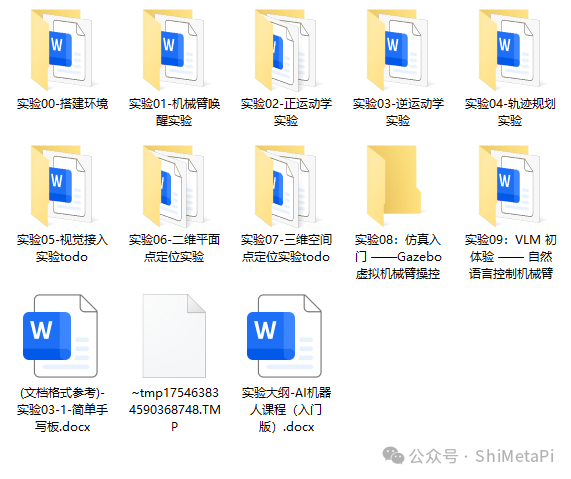 第一阶段:基础叫醒与节制(试验1-4)•试验1:硬件毗连、校准与单枢纽关头节制——让机械臂“动起来”。•试验2-3:正/逆运动学——把握枢纽关头角度与结尾位置互相推算的焦点数学道理。•试验4:轨迹计划——实现结尾履行器的光滑直线运动。第二阶段:视觉感知与空间映照(试验5-7)•试验5:视觉接入与颜色辨认——为呆板人装上“眼睛”。•试验6-7:逆透视变换与手眼标定(眼于手外/眼于手上)——实现从图象像素坐标到呆板人三维空间坐标的精准转换,这是视觉节制的基础。第三阶段:智能运用与综合使命(试验8-10)•试验8:Gazebo仿真——于虚拟世界中安全地练习训练及验证算法。•试验9:VLM天然语言节制——用一样平常语言批示机械臂,体验最直不雅的人机交互。•试验10:综合使命:积木分类——整合所有常识,完成一个完备的智能使命。拓展摸索(试验11)•试验11:具身智能试验:进阶内容,开端体验数据收罗、模子练习,让机械臂具有必然的自立进修能力。3、最先前,请务必确认您的预备
第一阶段:基础叫醒与节制(试验1-4)•试验1:硬件毗连、校准与单枢纽关头节制——让机械臂“动起来”。•试验2-3:正/逆运动学——把握枢纽关头角度与结尾位置互相推算的焦点数学道理。•试验4:轨迹计划——实现结尾履行器的光滑直线运动。第二阶段:视觉感知与空间映照(试验5-7)•试验5:视觉接入与颜色辨认——为呆板人装上“眼睛”。•试验6-7:逆透视变换与手眼标定(眼于手外/眼于手上)——实现从图象像素坐标到呆板人三维空间坐标的精准转换,这是视觉节制的基础。第三阶段:智能运用与综合使命(试验8-10)•试验8:Gazebo仿真——于虚拟世界中安全地练习训练及验证算法。•试验9:VLM天然语言节制——用一样平常语言批示机械臂,体验最直不雅的人机交互。•试验10:综合使命:积木分类——整合所有常识,完成一个完备的智能使命。拓展摸索(试验11)•试验11:具身智能试验:进阶内容,开端体验数据收罗、模子练习,让机械臂具有必然的自立进修能力。3、最先前,请务必确认您的预备为了顺遂最先这段路程,请确保您已经做好以下预备:
硬件预备(必需)• 地瓜派X5/地瓜派S100 开发板• Lerobot 6自由度机械臂• USB摄像头• 标定板(棋盘格)• 彩色积木(红、蓝、绿各色等)软件与情况预备(必需)•操作体系:强烈保举利用Ubuntu(试验示例及指令均基在此体系)。•焦点软件:需要安装 Conda(治理Python 3.8+情况)、ROS2(呆板人操作体系)、VS Code(代码编纂)以和课程专用的 Lerobot库。•情况搭建:请严酷根据《增补:编译情况搭建.docx》及《ROS情况搭建教程.docx》的步调举行操作。常识与技术基础(主要)•编程基础:把握基础的Python语法(用在年夜部门视觉及AI试验)及C/C++基础语法(用在理解底层驱动及MoveIt2相干代码)。•焦点观点:理解三维坐标系(X, Y, Z轴)及角度(弧度制)的观点,这是理解机械臂运动的基础。•东西利用:对于Linux终端号令有基本相识,可以或许举行文件操作、运行步伐等。4、焦点进修建议与提示•严酷按挨次进修:试验设计环环相扣。例如,不睬解运动学(试验2-3)就没法举行轨迹计划(试验4);不把握手眼标定(试验6-7),就没法实现精准的视觉抓取(试验10)。请勿跳步。•动手实践是要害:呆板人学是实践的科学。务必亲主动手毗连硬件、运行代码、不雅察征象并测验考试修改参数及指令。理论只有经由过程实践才能内化。•善用试验文档:每一个试验都有对于应的具体操作文档(如《试验01-1-硬件校准与简朴节制.docx》),此中包罗了试验道理、步调、代码及常见问题,是您最主要的“试验手册”。碰到问题时,起首回首文档。•理解焦点思惟:请时刻思索“坐标转换”这一焦点思惟——它贯串在从枢纽关头角度到结尾位置(运动学)、从图象像素到空间坐标(视觉)、从语言指令到动作参数(AI)的整个历程。•留意安全:于操作真实机械臂时,留意其运动规模,防止夹伤或者碰撞。于仿真情况(试验8)中可斗胆测验考试。 声明:本文内容和配图由入驻作者撰写或者者入驻互助网站授权转载。文章不雅点仅代表作者本人,不代表电子发热友网态度。文章和其配图仅供工程师进修之用,若有内容侵权或者者其他背规问题,请接洽本站处置惩罚。 举报投诉 《呆板人设计与实现》——低成本DIY呆板人,一本呆板人建造的经典入门书 `内容简介《呆板人设计与实现》是呆板人建造的入门书。《呆板人设计与实现》的作者按照多年来讲授科研的实践及领会,应用简明易懂的语言周全地讲述呆板人 发表在 08-01 18:21 【「# ROS 2智能呆板人开发实践」浏览体验】呆板人入门的引路书 的很是好的,尤其是一些流程图,很清楚的阐释了观点很合适作为初学者入门的引路书还有能相识许多技能及框架,破除了初学者的自大困境,让初学者知道功效是由许多开发者维护的,前人已经经为各类产物搭建了完美的框架。防止堕入患上一小我私家单打独斗的错觉一直摩拳擦掌ros2及 发表在 04-30 01:05 呆板人节制入门资料分享 本帖末了由 gk320830 在 2015-3-5 16:47 编纂 呆板人节制入门 发表在 01-07 12:35 呆板人册本年夜全!强烈保举 呆板人的参考手册,也可供泛博青少年竞技呆板人喜好者浏览参考。呆板人C语言电机一体化接口有视觉呆板人建造机 发表在 02-22 07:34 自律型呆板人建造入门.基在Arduino ]昨天 14:47 上传内容先容《自律型呆板人建造入门:基在Arduino》基在开源硬件思惟,彻底公然各个布局件的外不雅尺寸,节制板基在开源硬件范畴内广泛利用的Arduino,采用于Arduino之上又封装 发表在 06-23 11:18 呆板人建造实践入门教程 [img][/img]STM32-呆板人建造实践入门教程 发表在 08-16 09:59 进步前辈呆板人节制 《进步前辈呆板人节制》从节制的角度体系地先容了呆板人学的基础常识及当前的成长状态。全书共分为12章,由基础篇、节制布局篇及进步前辈 发表在 09-19 15:30 AI语音智能呆板人开发实战 第四期直播PPT下载:第三期直播PPT+步伐下载:第二期直播PPT下载:第一期直播PPT下载:主题简介和亮点:以AI智能语音陪护呆板报酬载体,完全解说整个呆板人研发的全流程,从开发情况搭建、到软硬件 发表在 01-04 11:48 智能小车呆板人建造年夜全 迷宫、画图、语音节制、线遥控、Wi-Fi视频监控等全方位功效的富厚实例。经由过程浏览这本书,你会周全相识智能小车呆板人的组成,于设计与建造智能小车呆板人方面得到思绪及灵感。 发表在 05-05 13:19 呆板人基础册本 枚举部门进修历程中接触的部门册本,部门有中文版,部门有更新版本。1.呆板人基础册本合适入门的册本:呆板人学呆板人建模计划与节制 发表在 05-22 06:53 呆板人节制的入门经验 对于在工科范畴来讲,离开实践的进修都是菲薄的,对于在节制这类夸大经验的技能更是云云。假如去问一个步伐员怎么进修一块技能,他一定让你去多编程。呆板人范畴也是。假如想把基本功打扎实,那末实践更是必不成少 发表在 05-24 07:43 【HarmonyOS HiSpark AI Camera】厅堂呆板人 项目名称:厅堂呆板人试用规划:申请理由:呆板人项目集成摄像头实现人脸辨认追随,认识鸿蒙体系。项目名称:厅堂呆板人项目规划:一个月内实现呆板人集成摄像头,整合人脸辨认功效,辨认客户信息, 发表在 11-19 20:49 ZN-1AI工业呆板人与智能视觉体系运用实训平台先容 ZN-1AI工业呆板人与智能视觉体系运用实训平台1、产物概述 ZN-1AI以工业呆板人与呆板视觉为焦点,将机械、气动、运动 发表在 07-01 10:07-球盟会